|
(位置控制,M-BUS)
【控制要求】
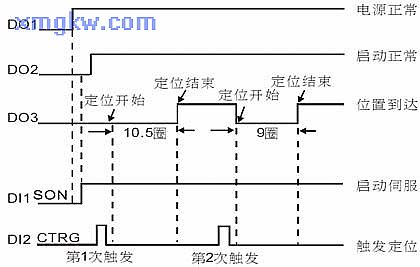
z 读取伺服驱动器的目标位置(增量型位置)(FUN150.M-BUS 指令“读取”实现);z 设置伺服驱动器的目标位置(增量型位置)(FUN150.M-BUS 指令“写入”实现);z 按下对应开关和按钮,伺服启动和定位动作被触发(利用伺服 DI1~ DI2 输入点);z 将伺服的状态通过面板上指示灯显示出来 (利用伺服 DO1~ DO3 输出点 )。
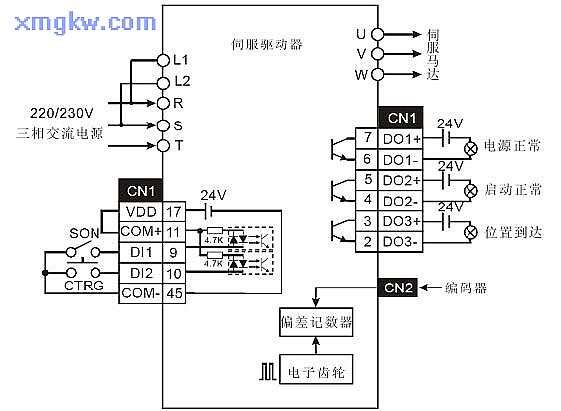
【伺服硬件接线图】
【ASD-A伺服驱动器参数必要设置】
※ 当出现伺服因参数设置错乱而导致不能正常运行时,可先设置 P2-08=10(回归出厂值),重新上电后再按照上表进行参数设置。
z操作步骤:
成后“位置到达 ”指示灯(对应DO3)会ON。【元件说明】
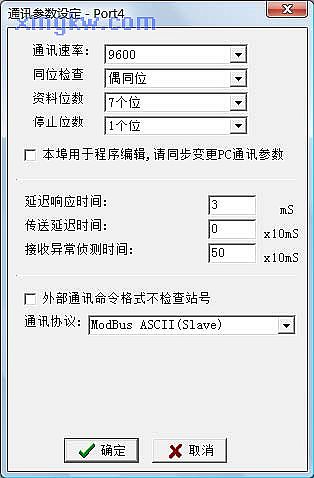
【通讯口参数设定】 PLC通讯口的参数需要与伺服驱动器一致。点选菜单栏的“ PLC” Æ“设定” Æ“Port4通讯参数”,将参数设为“9600baud,偶同位 ,数据位7,停止位 1”,接收异常侦测时间设为 500ms,采用 ModBus ASCII(Slave)通讯协议。
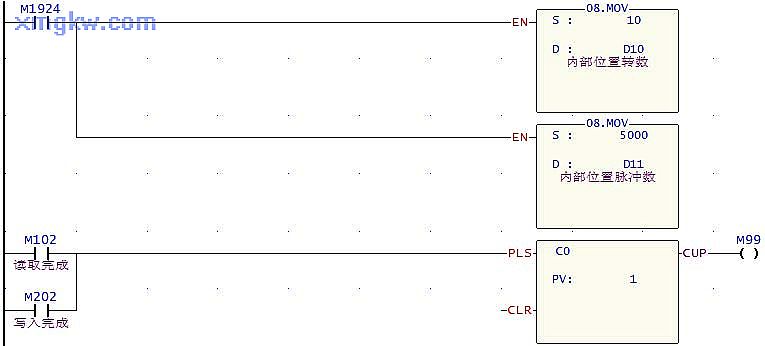
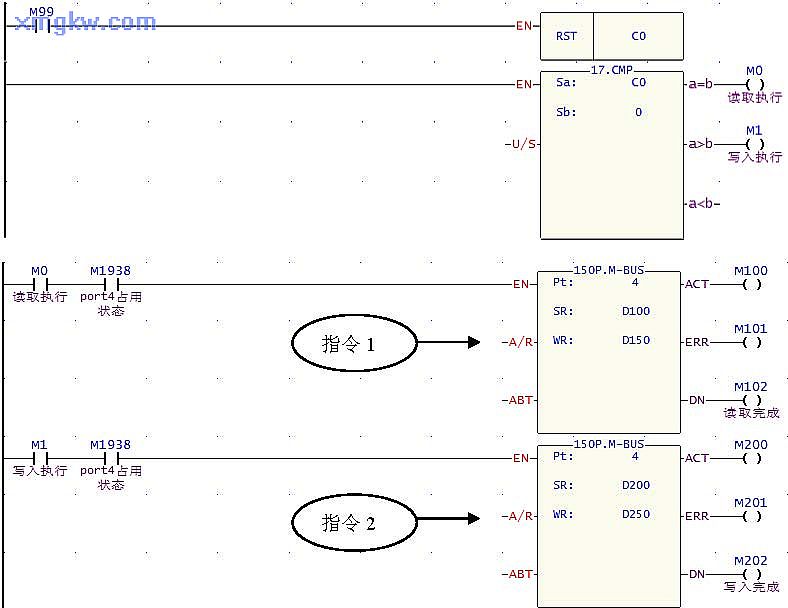
【控制程序】
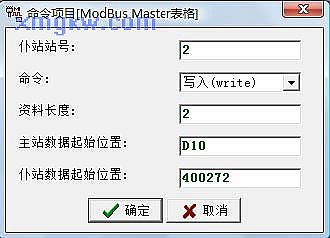
指令 1所对应的通讯命令表格: 指令 2所对应的通讯命令表格:
【程序说明】
|


资讯类别
推荐资讯


人气排行
- 06-30 1AB相脉冲高速计数
- 05-19 2【PLC】PLC ERR灯报警同时 Y0 和Y1 亮,错误码是 LAdder 程序 check sum 错误,这个错误一般都是由怎么原因引起的呢?
- 05-19 3【HMI】如何安装UNICON触摸屏USB驱动?
- 05-19 4合同能源管理概述及EPC、EMC区别
- 05-28 5上/下数计数器(UP/DOWN COUNTER)
- 05-19 6【变频器】变频器对电机自动调谐有什么意义?在什么情况下才需要进行自动调谐?哪些情况下可以不需要自动调谐?
- 06-30 7洗手间自动冲水控制程序
- 06-29 8永宏PLC与ASD-A伺服驱动器通讯
- 06-26 9永宏PLC在窑炉配料称重系统中的改进
- 05-19 10【PLC】PLC主机ERR灯报警且Y2点导通STACK异常报警 如何处理和解决