一种新型控制技术——PCC 在水电站中的应用
目前在工业自动化领域具有代表性的控制方式可分为:单板机和单片机系统、可编程控制器(PLC)、工业控制机(IPC) 和计算机集散控制系统(DCS)等四类。随着现代工业自动化越来越高的要求和计算机科学技术的发展,工业控制机和可编程控制器以及计算机集散控制系统正处在相互融合的发展阶段。而PCC ,即计算机可编程控制器,就是其中相互融合而产生的先进代表,它被认为是代表了当今工业控制技术的一大趋势。它面向控制并经济高效地集成了己广为工控界熟悉的PLC 和IPC(工控机)的特点。通过两者的相互融合,取长补短,从而以较高的性能价格比,构成当代高水平的工业控制平台。而水电厂,由于其控制的复杂性和多对象、多层次等特点,使得其控制在实时性、可靠性等方面往往不尽人意!而PCC 的出现,使得这几个方面得到了较大的改善。可以预见,PCC 将在今后更广泛地应用到水电站计算机监控系统中。
1 方案的比较
水电站监控系统是实现水电站综合自动化的基础,而现地控制单元,即LCU 是水电站计算机监控系统的基础和核心,其性能的好坏直接影响着整个计算机监控系统的工作状况。在目前的水电站监控系统中,较普遍的LCU 设计为工控机加PLC , 但也有单纯以工控机或PLC 为控制器的系统。下面对这几种方法进行比较。
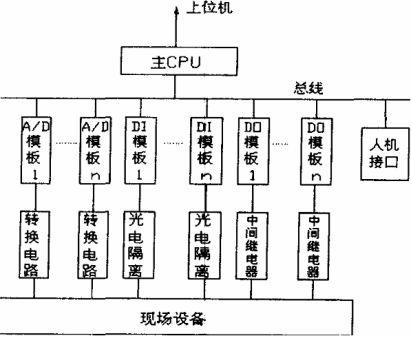
(l) IPC 控制。这种控制方式的结构图如图l :这种结构的线路设计极为复杂,且不能满足实时性和可靠性等要求。很少有电站采用此方案。
图1 以IPC为控制器的LCU 结构图
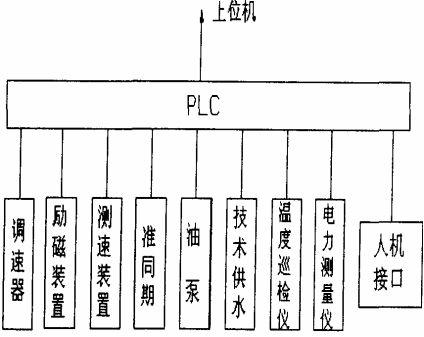
(2) PLC 控制。在这种控制结构中,PLC 不但负责顺序、数据处理等,还需要实现与上位机和现地设备等的通信。其结构图如图2 :单纯采用PLC为控制器的LCU,虽然结构比较简单,但也有很多不尽人意的地方。可编程控制器是按一般工业环境,采用标准化设计的,可靠性高,抗干扰性能好,但它事件分率不高,不能满足水电厂事件高分率的要求;另外其通信功能和数据处理能力受到一定的限制,一般的PLC无论是通信接口还是所支持的通信协议,都很难满足与多智能设备实现通信的要求。也有可以满足通信要求的,如Quantum 系列PLC,但其价格较为昂贵,性价比不高。
图2 以PLC为控制器的LCU 结构图
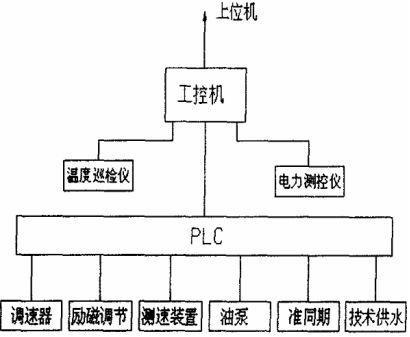
(3) IPC+PLC 。这是目前较普遍的LCU 的控制方式。在这种控制系统中,IPC主要负责数据处理,完成与上位机的网络通信和PLC等通信,实现人机接口等,而可编程控制器完成数据采集和顺控功能。其结构图如图3 :由图可知,PLC只与机组控制相关的设备连接在一起,而温度巡检仪和电量测控仪等智能设备,由于不参与机组控制,只显示与机组伏态相关的一些参数,因此与工控机通过通信连接在一起,由工控机负责把上传的信息进行处理。
在这种控制为式中,工控机作为计算机监控系统内部网络上的一个结点,各种数据经过工控机送到网上各个结点,控制命令经工控机下达到控制器等设备。因此,工控机的可靠性显得非常重要,工控机一旦故障,整个控制系统儿乎瘫痪。不但在上位机上下发的控制命令无效,且在现地的人机界面上也无法操作。虽然工控机是工控产品,但由于它的风扇、硬盘驱动器、软盘驱动器等旋转部件的存在,可靠性就降低了很多。且这种结构比较复杂。
图3 以IPC + PLC 为控制器的LCU 结构图
(4) PCC 控制。PCC是一种新兴工业技术,它集中了IPC和PLC两者的优点,其高可靠性和抗于扰能力以及强大的通信功能,使之在工业控制方面具有无可比拟的优势。因为水电站工作环境比较恶劣,控制任务繁重,且对事件分辨率要求较高,选用一般的IPC 或PLC 很难满足要求,因此我们选用PCC 作为现地控制单元的核心控制器。其结构和以PLC为处理器的LCU 的结构相同。(见图2)由图可以看出,以PCC 为核心的现地控制单元结构简单。且由于PCC 具有强大的通信功能和多任务的实时编程环境,使计算机监控在结构、技术路线、实现方法上都有所创新。
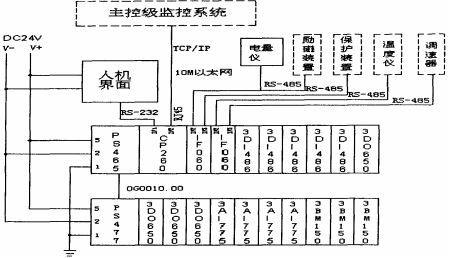
2 硬件设计 PCC 硬件是标准模件结构,全部模件均为固态插入或标准化结构组件。在底板总线上的设计采用了系统总线和I/O 总线分离布置的结构特点,大大提高了系统的可靠性和抗干扰能力。并提供多种接口卡和通讯模块,使得PCC 和多种智能设备的通信成为可能。由于PCC具有以上这些优点,因此以PCC作为核心控制器的LCU 的硬件线路设计便相对简单。其典型配置如图4 。
图4 典型配置图
面板开入信号、转速接点信号、保护信号、状态信号等通过DI模块输入PCC ,经用户程序判断处理后,发出相应的输出信号到DO 模块,控制输出继电器动作,从而控制二次电气回路。 PCC和调速器、励磁、保护、辅机等装置除用硬接线I / O 点交换信息外,还可用RS 一485 通信实现信息交换,有效的保证了系统的可靠性和信息的完整性。加之PCC设备本身己充分采取了电气隔离技术,因此在设计LCU 的电气回路时,在抗干优技术环节上便可大大节省人力。 3 软件设计
由于GPS 对时是保证整个系统精度的首要因素,事件顺序记录SOE 是关乎整个监控系统性能优劣的关键要素,于是将其设置为最高优先级。其次为采样、故障处理和事故追忆子程序,其循环时间为20ms 。至于开停机等控制操作和参数处理,我们将其循环时问设置为100ms,优先级次于采样等子程序。各通信子程序的优先级别最低。系统只有在响应完优先级别高的任务请求时,才会处理该级别的任务请求。
|